




 |
 |
 |
TRATAMIENTO QUIRÚRGICO DEL ADENOCARCINOMA DE ENDOMETRIO VÍA ROBÓTICA DA VINCI.Autores: Pluvio J Coronado, Miguel A. Herraiz, Jacqueline Macedo, José A. Vidart. Departamento de Obstetricia y Ginecología. Hospital Clínico San Carlos de Madrid. España.
INTRODUCCIÓN
Los enfoques mínimamente invasivos para el tratamiento del cáncer de endometrio han sido cada vez más adoptados por los oncólogos ginecológicos. El uso de la asistencia robótica en cirugía laparoscópica ginecológica esta aumentando actualmente, debido a sus ventajas: mejor visión tridimensional de las estructuras anatómicas, versatilidad de los instrumentos articulados, minimización del temblor y el movimiento a escala, reduciendo así las complicaciones operatorias. El tratamiento de elección del adenocarcinoma de endometrio es quirúrgico, realizándose una histerectomía total extrafascial con anexectomia bilateral y/o linfadenectomía pélvica y lumboaórtica, dependiendo del grado, tipo histológico y de la invasión miometrial. Esta cirugía puede realizarse asistida por robot, con todas las ventajas y beneficios que implica, por lo que describiremos la técnica quirúrgica paso a paso. Profilaxis y preparación de la paciente La profilaxis antibiótica se realiza con 2 gramos de Cefminox sódico IV treinta minutos antes de la intervención. En las pacientes con antecedentes de alergia a la penicilina y/o derivados, se administra gentamicina (240 mg IV) y clindamicina (600 mg IV) media hora antes de la intervención. Para la profilaxis de la enfermedad tromboembólica venosa se administra heparina de bajo peso molecular (40 mg de enoxaparina) 12 horas antes de la cirugía. Colocación de la paciente y del campo quirúrgico La intervención se realiza bajo anestesia general e intubación orotraqueal. Sondaje vesical permanente. Se procede a vendar las extremidades inferiores para disminuir la incidencia de trombosis. Se coloca a la paciente en decúbito supino y en posición de litotomía con las piernas semiflexionadas en abducción para el acceso vaginal. Los miembros superiores se colocan junto al cuerpo para disminuir las lesiones del plexo braquial y proporcionar mayor comodidad a los cirujanos. La paciente se coloca en posición de Trendelemburg con una inclinación de 30º aproximadamente. El primer ayudante se ubica del lado derecho o izquierdo (según preferencias de los equipos y según el lado en que se coloque el cuarto brazo robótico) de la paciente, para ayudar directamente al cirujano principal que estará ubicado en la consola del robot. Se colocan las fundas de plástico en los brazos del robot, y este se coloca centrado entre las piernas del paciente. El robot se sitúa entre las piernas de la paciente o bien a 45º de la paciente para tener mejor acceso vaginal. Figura 1. Colocación de la paciente 
COLOCACION DE LOS TRÓCARES
Se inicia la intervención con técnica abierta periumbilical para la colocación del trocar de Hason. Los trócares se colocan en una arco que va desde la espina iliaca anterosuperior derecha a la izquierda pasando por el ombligo (Fig. 2). El brazo izquierdo del robot será la mano derecha del cirujano y el brazo derecho del robot será la mano izquierda del cirujano; el cuarto brazo (brazo accesorio del robot) puede situarse a la derecha o izquierda de la paciente según las preferencias de cada equipo. En general, la tendencia es a colocarlo a la derecha de la paciente. El trocar auxiliar permite al cirujano ayudante colaborar con el cirujano en la aspiración-irrigación, disección, agarre, corte, etc. Se anclan los trocares en los brazos del robot y se coloca el material necesario: pinza de agarre para el cuarto brazo, pinza tipo Maryland, pinza bipolar para la mano izquierda y tijera monopolar en el brazo derecho. El cirujano controla los brazos robóticos de forma remota desde la consola con una imagen tridimensional de alta definición del campo operatorio. En la Fig. 3 se observa el ayudante y la disposición del robot entre las piernas de la paciente. Figura 2. Disposición de los trócares. Los trócares metálicos son los robóticos 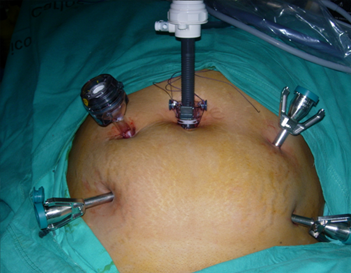 Figura 3. Disposición del cirujano asistente y el robot situado entre las piernas de la paciente. 
TÉCNICA QUIRÚRGICA
Se identifican todas las estructuras pélvicas y se realiza un lavado de cavidad con solución fisiológica que luego se recoge para citología del líquido peritoneal (este paso ya no se considera en la nueva clasificación de la FIGO). Se procede a levantar el ligamento redondo con el cuarto brazo y el cirujano sentado en la consola utiliza la tijera monopolar y la pinza bipolar para electrocoagulación y corte. El ayudante utiliza una pinza de agarre para sujetar el redondo hacia su unión con el útero. Figura 4. Apertura del ligamento ancho e identificación de las hojas anterior y posterior. Esta maniobra permite acceder a las estructuras pélvicas para identificarlas mejor antes de proceder a la sección de las estructuras.  Figura 5. Identificación, electrocoagulación y corte de ligamentos infundíbulopélvicos. Visualización de las estructuras pélvicas: vasos iliacos y uréter. Este paso se está realizando con Ligasure®, aunque podría realizarse mediante coagulación bipolar y corte. 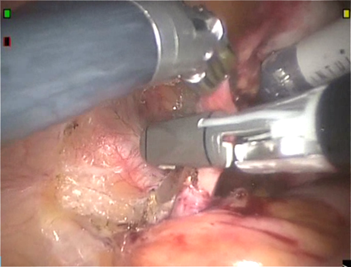 Figura 6. Apertura del peritoneo de la plica vesicouterina. Disección y rechazo de la misma. Este paso es importante ya que permite acceder a la cara anterior de la vagina y evitar lesiones vesicales. 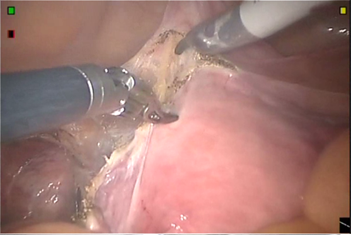 Figura 7. Identificación de la arteria uterina (izquierda), electrodisección y corte con Ligasure®. Este paso puede realizarse con coagulación bipolar y corte. 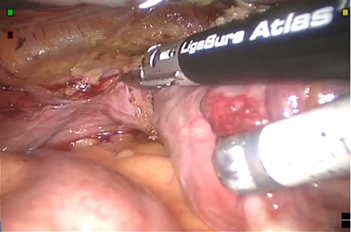 Figura 8. Apertura del peritoneo posterior seguida de electrodisección y sección de los ligamentos uterosacros. 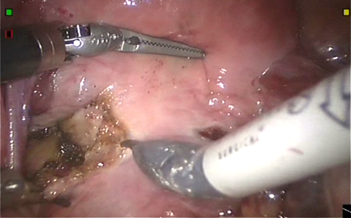 Figura 9. Identificación de los ligamentos útero sacros, coagulación bipolar y sección de los mismos. Esta acción se ve facilitada por la introducción de un movilizador vaginal para hacer protrusión en el saco vaginal posterior. 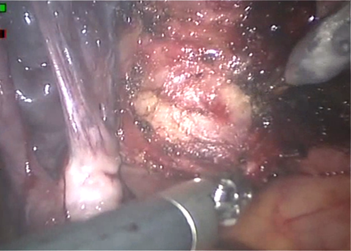 Figura 10. Disección del parametrio izquierdo con tijera monopolar. En estos casos es frecuente el sangrado, por lo que se recomienda coagulación bipolar previa o uso de selladores vasculares. 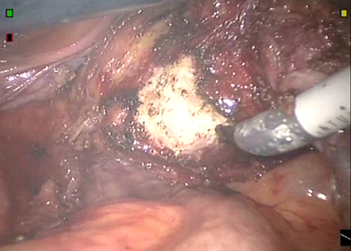 Figura 11. Apertura de la vagina con tijera monopolar ayudado por el manipulador vaginal. El manipulador protruye la vagina identificando el sitio de corte. 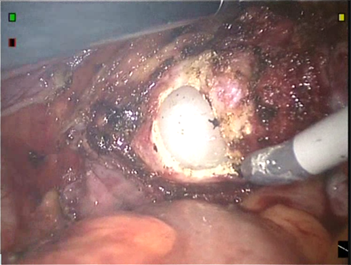 Figura 12. Extracción vía vaginal del útero. 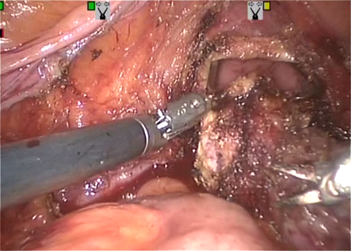 Figura 13. Cierre de la cúpula vaginal con sutura reabsorbible. La cirugía robótica permite anudar cómodamente, pero pueden usarse fijadores del hilo como Lapra-TY® o hilo barbado. 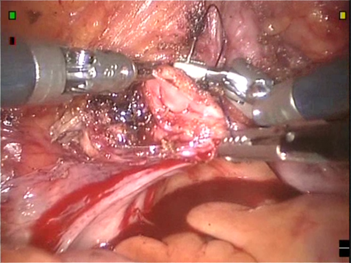 Tras la realización de la histerectomía el útero es estudiado en fresco por patólogos experimentados que comunican peroperatoriamente el tipo histológico, el grado de diferenciación y la invasión miometrial. En caso de adenocarcinomas grado 3, invasión miometrial profunda, tipo histológico no endometrioide o afectación del cérvix, está indicada la linfadenectomía pélvica y paraaórtica. Antes de comenzar es recomendable comprobar la integridad de ambos uréteres y realizar una revisión del campo quirúrgico. La linfadenectomía pélvica incluye la extirpación de los ganglios pélvicos (territorios de la iliaca externa hasta la común y la fosa obturatriz). Figura 14. Identificación de los vasos iliacos externos y disección de la fosa obturatriz. El nervio obturador marca el límite inferior y debe ser controlado en todo momento para evitar su lesión. 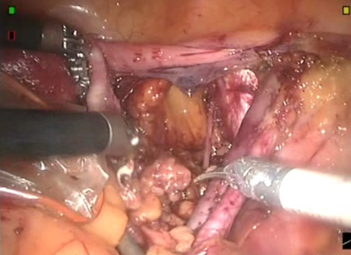 Figura 15. Disección de los ganglios paraaorticos hasta la vena renal izquierda. 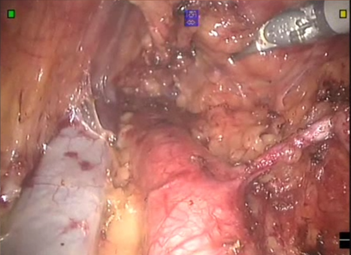
Números anteriores
T. Paso a paso Nº 36 Prostatecnomía radical asistida por robot con linfadenectomía y preservación de bandeletas neurovasculares: Técnica del Dr. Gastón para mejorar la continencia y la función eréctil. |