REPORTAJE CONGRESO DE CIRUGÍA ROBÓTICA “FIRST WORLDWIDE MEETING OF THE MINIMALLY INVASIVE ROBOTIC ASSOCIATION (MIRA)”
7 – 10 diciembre de 2005, INNSBRUCK (AUSTRIA)
http://www.mira2005.at
Durante los días 7 a 10 de diciembre se ha celebrado en el Hotel Penz de Innsbruck (Austria) la primera reunión internacional de la Asociación de Robótica Minimamente Invasiva (MIRA), una nueva sociedad interdisciplinaria e internacional cuya finalidad fundamental es la dedicación a la cirugía robótica minimamente invasiva. La Presidencia de la sociedad la ostenta GH Ballantyne (USA), y entre sus miembros más destacados se encuentran PC Giulianotti (Italia), S Horgan (USA), IAMJ Broeders (P. Bajos), T Schmid (Austria) y A Byer (USA).
La reunión fue organizada por T Schmid (Presidente) y J Bodner (Secretario) (Innsbruck, Austria) y se desarrolló a lo largo de tres intensas jornadas que simultanearon diversas conferencias sobre la situación actual de la cirugía robótica mundial en las diferentes especialidades con gran número de presentaciones libres y con la retransmisión en vivo de tres intervenciones desde el Hospital de la Universidad de Innsbruck: una de cirugía cardíaca, realizada por J Bonatti (Austria), una prostatectomía radical llevada a cabo por A Tawari (USA), y una pancreatectomía efectuada por PC Giulianotti (Italia).
La importancia de este evento radicaba en el hecho de ser la primera reunión mundial de especialistas diversos para intercambiar conocimientos y experiencia sobre cirugía robótica. SECLAEndosurgery no quiso perder la oportunidad de acudir y elaborar este reportaje para nuestros lectores.
Jueves 8 de diciembre. Mañana
Tras la sencilla apertura de la reunión, a cargo del Presidente de MIRA, Dr. G Ballantyne (USA), y del Presidente del Congreso Dr. T Schmid (Austria), se dio paso a una serie de conferencias sobre “el estado del arte” (State of the art lectures), moderada por T Schmid.
La ronda se inició con el Dr. PC Giulianotti (Italia), con respecto a Cirugía General. El conferenciante clasificó las intervenciones en tres grandes grupos con relación al abordaje robótico:
- Intervenciones que solo se pueden hacer con el robot: aneurismectomías de arterias viscerales, microsuturas, hepaticoyeyunostomías de calibre reducido, linfadenectomías complejas.
- Intervenciones que mejoran en cuanto a su realización técnica si se hacen con el robot: miotomía de Heller, duodenopancreatectomía, esofaguectomía, gastrectomía.
- Intervenciones que no varían: colecistectomía, fundoplicatura de Nissen, adrenalectomía, resección de colon. Que sin embargo no deben dejar de hacerse, primero contribuyen al aprendizaje y luego mantienen la formación del equipo quirúrgico.
|
|
|
| Dr. PC Giulianotti
Hospital de la Misericordia, Grosetto (Italia)
|
Entre las intervenciones del primer grupo, el Dr. Giulianotti describió la experiencia de su grupo en disección y clampaje vascular, así como en microanastomosis vasculares, con 11 aneurismectomías, 7 esplénicas y 4 renales. En cuanto a la duodenopancreatectomía, con una N de 34 casos (de los cuales 15 efectuados con técnica híbrida), los resultados se resumieron en: índice de conversión del 20,5% (7/34), tiempo medio de intervención de 402 min. (últimos diez casos, 354 min.), necesidad de transfusión en 5,8% (2/34) (ninguna intraoperatoria), incidencia de morbilidad del 32,3% (11/34) (fístulas de bajo gasto, pancreatitis, hemorragia postoperatoria) y mortalidad del 5,9% (2/34) (un síndrome de Boerhaave y un infarto colónico). La técnica robótica también fue empleada en la experiencia de este ponente en la hepatectomía, contando con 27 resecciones hepáticas de las cuales 11 resecciones hepáticas mayores (5 derechas, una izquierda y 6 bisegmentarias), con un índice de conversión del 3,7% (1/27), una morbilidad del 11% (3/27) y sin mortalidad asociada.
Para mencionar la cirugía colorrectal robótica, el Dr. Giulianotti se refirió a la experiencia del grupo de D’Annibale (Padua, Italia), publicada en Dis Colon Rectum 2004;47(12):2162-66, para destacar la especial utilidad del robot Da Vinci en determinados pasos del procedimiento, como la disección del ángulo esplénico, la disección del recto en pelvis estrechas, la identificación de los plexos nerviosos y la realización de anastomosis manuales, así como la necesidad de evaluación ulterior del coste-beneficio del procedimiento frente a la asistencia laparoscópica habitual.
Continuando con su propia experiencia, el ponente explicó sus resultados en el tratamiento quirúrgico del reflujo gastroesofágico con asistencia robótica: con un total de 113 procedimientos de Nissen y 4 de Toupet, mencionó un 2,5% de conversiones (3/121), un tiempo medio de intervención de 107,5 min. y una morbilidad del 1,6% (2/121) (lesión hepática y hemorragia postoperatoria), sin mortalidad asociada.
|
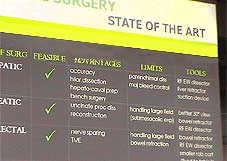
El estado del arte en robótica en Cirugía General
|
La situación actual para la cirugía robótica en el ámbito de su especialidad fue resumida por el Dr. Giulianotti como se presenta en la diapositiva:
- Cirugía hepática mayor. Las ventajas aportadas son la precisión, la disección hiliar, la preparación hepato-cava y la cirugía de banco. Los inconvenientes fundamentales se plantean ante la disección del parénquima y para el control de hemorragias importantes.
- En cirugía pancreática, la mayor ventaja radica en la disección del proceso uncinado y a la hora de la reconstrucción. El principal inconveniente es la amplitud del campo, que requiere exposición inframesocólica.
- En la cirugía colorrectal, la disección nerviosa y la del mesorrecto son las más beneficiadas por la cirugía robótica, mientras que la necesidad de manejar un campo muy amplio y la dificultad en la retracción del paquete intestinal son sus principales inconvenientes.
- Por último, en la cirugía gástrica, la facilidad de efectuar linfadenectomía hasta el nivel D2 y la posibilidad de efectuar microsuturas son las ventajas atribuidas al robot, mientras que el manejo del campo y las anastomosis esofágicas son sus limitaciones más importantes.
El ponente concluyó afirmando que en Cirugía General muchas intervenciones son realizables utilizando el robot, pero son difíciles, consumen mucho tiempo, no han demostrado ser beneficiosas para el paciente y su coste es elevado, y que es necesario llevar a cabo estudios prospectivos aleatorizados y multicéntricos antes de difundir la técnica robótica.
A continuación, el Dr. A Tewari (USA), del Hospital New York Presbyterian, continuó con respecto a Urología, con la conferencia Robotic prostatectomy: current state of affairs. En ella, el Dr. Tewari destacó la importante aportación que ha supuesto la cirugía robótica para la prostatectomía radical, contribuyendo a la consecución de sus tres grandes retos:
- Control del cáncer: márgenes amplios, extirpación de la fascia, disección apical.
- Conservación de la continencia.
- Preservación de la función sexual.
|
|
|
Dr. A Tewari
Hospital New York Presbyterian (USA)
|
|
Typical robotic surgeon
|
Probablemente sea la prostatectomía radical el procedimiento más frecuentemente realizado mediante cirugía robótica. De acuerdo con los datos presentados por el ponente, el número de prostatectomías robóticas realizadas en el mundo ha pasado de 36 en el año 2000 a 18.000 en el año 2005, y se prevé que esta cifra casi se duplicará en el 2006. Las razones son fundamentalmente dos: la drástica reducción en la incidencia de complicaciones con respecto a la cirugía abierta y la asequible curva de aprendizaje con respecto a la cirugía laparoscópica habitual.
La sesión continuó con la aportación del Dr. W Nifong (USA) sobre la aplicación del robot en Cirugía Cardíaca, con interesantes e ilustrativas imágenes de diferentes aspectos de algunos de los procedimientos más frecuentes, como la reparación de la válvula mitral y la cirugía de revascularización miocárdica.
En el terreno de la Ginecología, resultó muy interesante escuchar al Dr. A Advincula (USA) por el gran entusiasmo con que hizo partícipe a la audiencia de las grandes posibilidades de la cirugía robótica en su especialidad. La filosofía del ponente era que la robótica permite que la cirugía laparoscópica se pueda llevar a cabo igual que la cirugía abierta:
- Los pedículos vasculares pueden ligarse con suturas
- El lecho de resección de los miomas uterinos puede suturarse en varios planos
- Histerectomía
- La cúpula vaginal se puede cerrar fácilmente con sutura manual
- Disección de los ganglios linfáticos
- Manipulación y sutura de mallas
- Posibilidad de efectuar técnicas microquirúrgicas
Presentó imágenes de reanastomosis tubáricas y de miomectomías que realmente corroboraban el argumento inicial, asegurando que la histerectomía, la enucleación de miomas, la extracción de los mismos y la reparación de la pared uterina son procedimientos complejos por laparoscopia convencional que se simplifican en gran medida cuando se realizan con la ayuda del robot. El conferenciante terminó su intervención afirmando que el límite de la cirugía robótica en Ginecología es la imaginación de cada uno (“you have to think out of the box”).
A continuación, el Dr. I Broeders (Países Bajos) puso al día la experiencia robótica en Cirugía Vascular, empezando por explicar los trabajos preliminares en cerdos llevados a cabo en las Universidades de Utrecht y Ámsterdam, en los que se realizaron disecciones aórticas, clampaje y sección de la arteria y anastomosis con parches de Goretex, con resultados óptimos ya que los cerdos intervenidos con el robot precisaban menos tiempo de intervención y sufrían menos pérdida sanguínea que los controles. Con esta experiencia, se realizó en su hospital el primer bypass aórtico en un paciente en febrero de 2004. El ponente reportaba cuatro casos, uno retroperitoneal y tres transperitoneales, todos ellos con una pérdida sanguínea inferior a 200 cc. durante la intervención. Reconocía que son pocos casos pero señalaba que en la literatura no hay muchas series más largas, salvo la que citaba de Kolvenbach et al. de 50 casos, diez de ellos con el robot Zeus, con el que este grupo reporta que la anastomosis se realiza en menos tiempo que con el Da Vinci.
En lo referente a Cirugía Pediátrica, el siguiente ponente, Dr. R Jackson (USA), del Arkansas Children’s Hospital, empezaba por considerar las ventajas añadidas de la cirugía robótica en los niños, referidas a las grandes variaciones en el tamaño de los pacientes y a la posibilidad de facilitar la cirugía reconstructiva. El Dr. Jackson repasó la literatura desde 2002, en que aparecieron los primeros trabajos describiendo la aplicación de la cirugía robótica a este grupo de pacientes, y afirmó que el uso del Da Vinci a lo largo del 2004 en Cirugía Pediátrica se reparte en un 61% para procedimientos de Cirugía General, un 37% para procedimientos urológicos y un 2% para otros (donde se incluye la Cirugía Cardíaca).
En el Hospital Infantil de Arkansas el Da Vinci está disponible desde abril de 2003 y en agosto del mismo año se le añadió el cuatro brazo. Desde entonces el ponente refería una experiencia de 82 casos, de los cuales la mayoría eran Nissen (50) y colecistectomías (16), con una media de edad de los pacientes de 10 años (rango de 6 meses a 20 años), una media de tiempo de intervención de 157 min. y escasa incidencia de conversiones (dos a laparoscopia estándar y tres a cirugía abierta).
Después de la pausa del café se continuó la mañana con una mesa de Presentaciones Libres moderada por P Giulianotti (Italia) y W Kelley(USA). La primera presentación fue una conferencia invitada del Dr. R Satava (USA) titulada “Robotics beyond the scope of endoscopic surgery”. Escuchar al Dr. Satava resultaba fascinante pero nada de lo que explicó en su conferencia parecía tener ninguna relación con el quehacer diario de los cirujanos de nuestro país. Mostró una película de una apendicectomía transgástrica (realizada a través de una gastroscopia) que impresionó a la audiencia, e hizo algunas reflexiones sobre el futuro:
- La simulación formará parte de los procedimientos quirúrgicos
- La formación será evaluada de forma continua
- La formación se basará en gran medida en la cirugía robótica
También mencionó algunas innovaciones tecnológicas que ya se encuentran disponibles, como las consolas para cirugía celular, la iluminación de ubicación variable o “mar de cámaras” (OR Intelsun, que se está utilizando ya en Barcelona), o el control de los instrumentos con el pensamiento. Tantas y tan extraordinarias novedades que el ponente terminó mencionando el “futuro posthumano” que nos espera.
A continuación el Dr. DS Elliott (USA) presentó la técnica y los resultados de la colposacropexia robótica por prolapso vaginal (Robotic colposacropexy for vaginal vault prolapse). Este urólogo de la Clínica Mayo (Rochester, Minessotta) empezó justificando la técnica por la gran incidencia del prolapso vaginal tras la histerectomía (2-10%) y porque el robot disminuye el tiempo de intervención y facilita la realización de las suturas, permitiendo que la paciente se beneficie de las ventajas del abordaje laparoscópico y también de los buenos resultados de la reparación transabdominal (éxito del 93-99%) frente a los de la reparación transvaginal, con un 25-30% de fallos. El ponente presentó la técnica, efectuada mediante cinco trócares y colocándose una malla de tres hojas diseñada para el procedimiento (malla de polipropileno Intepro) cubriendo la vagina y suturándola a esta y al retroperitoneo.
La experiencia del Dr. Elliott era de 31 casos, veinte de ellos con un seguimiento mínimo de 12 meses. La edad media de las pacientes era de 66 años y el tiempo medio de intervención de 3 horas (rango 2-5), con una sola conversión. Las complicaciones postoperatorias se resumían en: infección leve de orificio de trócar (2 casos), rectocele (1 caso) y extrusión de la malla por vagina (2 casos). El grado de satisfacción de las pacientes con el procedimiento era adecuado en 30/31 casos.
Cerró esta mesa el Dr. R Littleton (USA), del Vattikuti Urology Institute, con la técnica y los retos planteados por la nefrectomía parcial asistida por el robot (Da Vinci assisted robotic partial nephrectomy: technique and initial experience at the Vattikuti Urology Institute). Mostró la técnica, con abordaje transperitoneal, y los resultados de 10 pacientes con masas unilaterales y riñón contralateral normal. Describió la utilización de ecografía intraoperatoria para identificar la tumoración y resecarla con al menos 5 mm de margen y habló de las diversas posibilidades de hemostasia del parénquima restante que existen.
Al final de la mañana, el Dr. GH Ballantyne (USA), Presidente de MIRA, del Hackensack University Medical Center, presentó la Conferencia Whence we come, whither we go? From Hippocrates to augmented reality surgery. Partiendo de la idea de que los conceptos simples llevan a grandes avances en la Cirugía, el Dr. Ballantyne hizo un breve repaso de las ideas simples en la historia de la Cirugía y cómo han contribuido al progreso de la misma. Explicó con sencillez porqué operar con robots en lugar de utilizar el abordaje laparoscópico habitual:
- Porque es más fácil
- Porque permiten operar a distancia
|
Dr. G Ballantyne
Hackensack University Medical Center (USA)
|
Después de presentar un video de hemicolectomía derecha realizada con el robot para demostrar su teoría de la sencillez, pasó a explicar el concepto del “cirujano digital”. El conferenciante impresionó a la audiencia presentando un robot que conectaba en tiempo real con su Hospital en Hackensack (USA), de manera que el podía, desde el robot, caminar por el Hospital mostrándolo a la audiencia y saludando a las personas que se encontraban trabajando allí. A continuación el robot apareció en la sala y un cirujano, desde el mismo Hospital, se presentó y explicó a los impresionados asistentes (su cara en una pantalla del robot, a modo de cabeza) el funcionamiento del equipo y sus grandes posibilidades.
Simultáneamente, en la Sala de Video, se estaba retransmitiendo en directo una prostatectomía radical realizada con el Da Vinci realizada por el Dr. A. Tawari (USA) en el Innsbruck University Hospital.
Jueves 8 de diciembre. Tarde
Después de la pausa de la comida, se inició una mesa de comunicaciones libres moderada por A Byer (Austria) y R Margreiter (Austria). A continuación comentamos algunas de ellas:
- G Pernazza (Italia) Improved early survival after robotic gastrectomy
- L Felicioni (Italia) Robotic treatment of visceral aneurysms: a new standard of care?
- A Pigazzi (USA) Robotic and laparoscopic-assisted surgery for rectal cancer
Este ponente presentó una serie de 20 pacientes con cáncer de recto intervenidos 11 de ellos con asistencia robótica y 9 con asistencia laparoscópica habitual. El margen de resección fue superior a 3 cm. en ambos grupos y la estancia postoperatoria de cinco días. En el postoperatorio no se evidenció ninguna fístula pero sí un absceso en cada grupo.
- I Broeders (Holanda) Standard laparoscopic versus robot-assisted laparoscopic Nissen fundoplication for refractory gastroesophageal reflux disease: a randomized controlled trial
En este caso se presentó una serie comparativa de 25 procedimientos de Nissen realizados con el robot frente a otros 25 realizados por laparoscopia. El ponente sostenía que la asistencia del Da Vinci hace que la solapa sea más estándar y más reproducible, así como más cómoda su realización por el cirujano, por lo que los resultados son mejores. El ensayo era prospectivo y aleatorizado y en el seguimiento se tenían en cuenta factores subjetivos (cuestionario de calidad de vida es escala analógica visual) y objetivos (endoscopia, tránsito esofagogastroduodenal, pHmetría y manometría postoperatorios). La estancia media fue de tres días para ambos grupos. Las diferencias en cuanto a los resultados no fueron significativas. El autor describió tres casos de esofagitis residual, tres casos de hernia deslizante (uno con robot y dos sin él) y ocho reintervenciones (tres después de laparoscopia y cinco después de robot), la mayoría por disfagia y algunas por RGE persistente.
En la Discusión de esta comunicación se comentó que probablemente la N es insuficiente para encontrar diferencias entre los dos procedimientos. Sin embargo, se reconoció que la fundoplicatura de Nissen es una buena operación para aprender a operar con el robot y el Dr. Giulianotti, presente en la sala, comentó que el da Vinci permite llevar a cabo esta intervención en una Unidad de Día y como “solo-surgery”.
- V Narula (USA) A new objective skills assessment system for telerobotic surgery
El Dr. Narula, de la Ohio State University, presentó un estudio comparativo de la realización de tareas de sutura por laparoscopia, con el robot y con un grupo control. La premisa del trabajo era que el simulador quirúrgico PROMIS sirve para evaluar el aprendizaje con el robot. Para ello se planteaba la realización de tres tareas distintas en tres sesiones consecutivas, evaluando el tiempo empleado para su ejecución, la amplitud del ejercicio efectuado y la precisión del mismo. La conclusión era que el simulador es útil para la evaluación del aprendizaje.
- M Anvari (Canadá) Use of a portable telesurgical robot in an extreme environment. The NEEMO 7 and 9 missions
Este ponente describió dos misiones de la NASA (NEEMO 7 y 9) en las que se ha evaluado la cirugía de telepresencia con robot portátil, para llevarla a cabo en situaciones extremas. También presentó un robot de cirugía abierta, que está siendo desarrollado también por Intuitive Surgical. El problema fundamental al que se enfrenta este tipo de cirugía son los tiempos de latencia: lo que tarda en llegar la señal del equipo “maestro” al receptor.
- H Rivas (USA) A magnetic positioning system to drive trocarless laparoscopic instruments
Esta comunicación, del Dr. H Rivas, del Automated Roboted Texas Institute americano, fue muy curiosa. Se presentó la posibilidad de realizar cirugía laparoscópica sin trócares, mediante la utilización de imanes que se colocan en la pared del paciente y sirven para sujetar los instrumentos, que de este modo se pueden movilizar sin necesidad de abrir nuevos puertos. Los imanes debían ser más potentes cuanto más gruesa la pared del paciente.
- P Sains (Inglaterra) Remote presence support and tutoring of surgical skills
El Dr. P Sains, del Departamento de Biocirugía y Tecnología Quirúrgica del Imperial College de Londres, explicó como está cambiando el panorama de la Cirugía en Inglaterra porque la escasez de cirujanos obliga a que enfermeras y personal paramédico lleven a cabo algunas tareas tradicionalmente realizadas por cirujanos. Esto hace que hayan aparecido conceptos como el de “Telemedicine support of non-medical staff” y que sea necesario formar al personal paramédico como “Perioperative Specialist Practitioners” (PSPs). Esta formación puede llevarse a cabo mediante telepresencia: el ponente mostró imágenes de una sala en la que varias enfermeras practicaban la realización de suturas, monitorizadas por un profesor que daba instrucciones por control remoto.
Tras el café, la última mesa de comunicaciones libres del día fue moderada por I Broeders (Holanda) y C Marth (Austria), con los siguientes contenidos:
- S Dogan (Alemania) Experience with totally endoscopic arrested heart procedures enables successful totally endoscopic off pump surgery for single vessel CABG
- J Rueckert (Alemania) Complete thoracoscopic thymectomy with a unilateral 3-trocar technique using the Da Vinci robotic system
- M Angelini (Italia) Robotic assisted minimally invasive pancreatic resections: the modern way of avoiding blood transfusions
- F Sbrana (Italia) Major robotic hepatic resections: technical details and a standardization proposal
- J Magrina (USA) Radical hysterectomy type II: Robotic parametrial ureteral dissection
- J Magrina (USA) Robotic surgery in gynaecologic cancer
- C Gutt (Alemania) Robot-assisted esophageal resection: experiences in Heidelberg
Viernes 9 de diciembre. Mañana
La primera mesa de comunicaciones libres de la mañana del viernes fue moderada por GT Sung y J Mueller y en ella se presentaron las siguientes comunicaciones:
- G Friedrich (Austria) Hybrid coronary revascularization: an attractive option for patients with multivessel coronary artery disease
- V Gorodner (USA) Effect of the learning curve on outcomes after robotic assisted donor nephrectomy (RALN)
- J Hubert (Francia) Laparoscopic transperitoneal pyeloplasty using a remote-controlled robotic surgical system (Da Vinci). 70 cases and one year follow-up
- Y Shermann (USA) Four-arm robotic gastric bypass: a new technique
- C Galvani (USA) The learning curve for robotic-assisted laparoscopic Roux-en-Y gastric bypass (RALRYGB) in 25 patients
- A Antico (Italia) Splenic artery aneurysmectomy with combined laparoscopic-robotic technique (CIrt): literature review and our preliminary experience
- A Melfi (Italia) Video robotic lobectomy
Tras una pausa para café se continuó con una Mesa titulada Future of Surgery and Virtual Reality, moderada por A Byer (Austria). La primera ponencia corrió a cargo del Dr. L Soler (Francia), del Instituto IRCAD de Estrasburgo, que intervenía por videoconferencia, hablando sobre Imaging and image fusion. Este ponente habló de la posibilidad de construir la anatomía del paciente en tres dimensiones a partir de imágenes de CT o de RMN, para planificar preoperatoriamente la intervención. Esto además permitiría simular la intervención con imágenes virtuales, para decidir incluso la posición más adecuada de los trócares, y minimizar la posibilidad de incidentes o de complicaciones durante la intervención.
En la Discusión, el moderador de la Mesa preguntó a la sala si alguien tenía experiencia con este tratamiento preoperatorio de la imagen y uno de los asistentes respondió que en Munich su grupo llevaba dos años aplicando este procedimiento solo en cirugía hepática. La utilidad fundamental que este cirujano encontraba al sistema era la evaluación de la posibilidad de resección. Refirió que en un 20% de casos se operaron pacientes que de otro modo no se hubieran operado.
La telecirugía como posibilidad aportada por la cirugía robótica fue tratada por el siguiente ponente, Dr.M Anvari (Canadá), en su ponencia The role of telesurgery. El Dr. Anvari mencionó que la primera cirugía realizada a distancia fue el 7 de setiembre de 2001, entre Nueva York y Estrasburgo y se trató de una colecistectomía laparoscópica en un cerdo. Las indicaciones de la telecirugía hasta este momento fueron resumidas del siguiente modo:
- Uso militar y extraterrestre
- Uso civil
- En situaciones extremas (alta montaña, fondos marinos)
- En regiones remotas y rurales
- Para el intercambio de conocimientos quirúrgicos
La experiencia del ponente en telecirugía se centraba en la cirugía de telepresencia rural y dio comienzo en la clínica el 28 de febrero de 2003, fecha en que él mismo intervino a un paciente que se encontraba en otro hospital. La justificación de este tipo de cirugía, según el Dr. Anvari, se basa en la necesidad de apoyo a los cirujanos rurales, la necesidad de transferir experiencia y evitar movilizar al paciente o al cirujano. Hasta la actualidad, 22 intervenciones han sido llevadas a cabo de este modo por este cirujano (15 Nissen, 5 resecciones de colon y 2 hernioplastias inguinales), que destaca la importancia de la colaboración entre los dos cirujanos (el que opera y el que está junto al paciente) para lograr el éxito de la empresa. Desde el punto de vista técnico, la cirugía de telepresencia es posible con latencias de hasta 500 milisegundos, pero no superiores. La calidad de la comunicación es extraordinariamente importante.
A continuación L Smith (USA), de Intuitive Surgical, presentó el punto de vista de la empresa en cuanto al desarrollo de tecnologías para el futuro (The company view of the next generation robotics). Mencionó la excelente acogida que ha tenido el Da Vinci en todo el mundo y la impresionante perspectiva para los próximos años en cuanto a su difusión. Reconoció la necesidad de implementar el manejo del equipo en varios aspectos, como la disponibilidad de instrumental, la integración en el quirófano, la reducción del tamaño, la facilidad de su desplazamiento y utilización... Todas estas líneas de trabajo están siendo desarrolladas por la compañía y como ejemplo mencionó algunos de los nuevos instrumentos que saldrán al mercado en 2006:
- Pinzas bipolares fenestradas
- Tijeras de Maryland bipolares fenestradas
- Instrumentos selladores
- Instrumentos de irrigación y succión
- Pinzas de agarre para cirugía torácica
- Cánulas de balón
El ponente explicó que Intuitive Surgical también trabaja en monitores de alta resolución con entrada para múltiples señales, en la formación mediante simulación de las tareas llevadas a cabo por el robot, en software avanzados que permitan la planificación preoperatoria de la intervención y en consolas de entrenamiento, entre otras grandes áreas.
La siguiente ponencia, titulada Mechanical alternatives and their future role, fue presentada por el Dr.J Burghardt (Alemania), del equipo del Dr. G. Buess. Desde el punto de vista tecnológico, entre los instrumentos quirúrgicos convencionales y los instrumentos robóticos existe un espacio que rellenan los manipuladores mecánicos, instrumentos basados en la tecnología robótica pero aplicables en la cirugía convencional. El Dr. Burghardt presentó algunos ejemplos: el Radius Surgical System, un manipulador mecánico con seis grados de libertad de movimiento (DOF) o el Endofreeze Trocar Holding System, un sistema de sujeción de los trócares que se fija a la mesa y que está pensado para “solo-surgery”.
A continuación, el Dr.I Broeders (Holanda) comentó las multiples aplicaciones de la realidad virtual en la cirugía endoscópica en su ponencia Current status of surgical simulation and its future role in robotics. Según afirmó el ponente, el campo de aplicación de la realidad virtual en este ámbito abarca tres grandes áreas:
- Formación
- Preparación de la cirugía
- Guía perioperatoria
El Dr. Broeders explicó la posibilidad de incluir un sistema de entrenamiento basado en realidad virtual en la consola del robot Da Vinci para aumentar sus aplicaciones.
La Mesa se cerró con el Dr.M Zenati (USA), que habló de un robot específico para cirugía intrapericárdica, el Snake, en su ponencia High dexterity “Snake” robot for intrapericardial interventions.
Simultáneamente con el desarrollo de esta Mesa, se iniciaba en la Sala de Video la retransmisión en vivo de una duodenopancreatectomía cefálica asistida con el robot Da Vinci, realizada por el Dr. PC Giulianotti en el Hospital Universitario de Innsbruck. La intervención se prolongó a lo largo de unas cinco horas y la anastomosis pancreatoyeyunal fue realizada a mano.
Viernes 9 de diciembre. Tarde
Mientras, en la Plenary Hall se continuaba con otra mesa de comunicaciones libres moderada por G Di Eusanio y M Manon. Estos fueron sus contenidos:
- V Falk (Alemania) Current developments in robotic totally endoscopic coronary artery bypass grafting
- K Adam Lee (USA) Redefining video assisted thoracoscopy with a four arm robotic pulmonary lobectomy
- V Patel (USA) Outcomes of robotic radical prostatectomy: 500 case series
- M Fumo (USA) The Vattikuti Institute Prostatectomy: a single surgeon experience of 1452 cases
- K Badani (USA) Anterolateral fascia sparing robotic radical prostatectomy: the super VIP, a novel nerve sparing technique for focal and functional patients
- S Breitenstein (Chequia) Robotic assisted versus laparoscopic cholecystectomy: outcome and cost analysis in a case-matched control study
- J Boone (Holanda) First experience with robot-assisted thoracoscopic esophago-lymphadenectomy for esophageal cancer
Después de la pausa del café, la última Mesa del día fue dedicada a Common problems, y moderada por A Tewari y F Sbrana. Su primer ponente fue el Dr. G Yang (Inglaterra), del Imperial College of London, que habló sobre formación en cirugía robótica: Teaching robotics: who and how? El Dr. Yang habló de la dificultad que plantea obtener imágenes preoperatorias de alta calidad y precisión, de problemas como la visión binocular y los movimientos cardíacos y respiratorios, e introdujo un elemento interesante de debate que es la confianza: por muy inteligentes y autónomos que fueran los robots, ¿usted confiaría en ellos para una intervención?
Concluyó mencionando la necesidad de tender un puente entre la inteligencia humana y la artificial, para poder seguir avanzando en este campo.
Continuando con el tema de la formación, pero esta vez desde la perspectiva americana, el Dr.A Byer (USA) presentó su ponencia Training and credentialling of robotic surgeons. La necesidad de formación parte de la responsabilidad ética, social e incluso económica que el cirujano tiene sobre lo que sucede en el quirófano. De ahí la regulación por parte de diversas organizaciones, en forma de “líneas guía” para la obtención de “privilegios” (a modo de licencias para realizar procedimientos concretos en los hospitales americanos). La cirugía robótica no escapa a esta regulación, y el Dr. Byer explicó los diversos cursos existentes en su institución para la formación en este campo. Así, el curso básico incluye los siguientes contenidos:
- Funcionamiento del sistema
- Preparación del quirófano
- Abordaje de los problemas más comunes
- Formación del equipo quirúrgico
Pero no incluye las diversas técnicas quirúrgicas, que se enseñan en cursos específicos de especialidades:
- Cirugía Cardíaca
- Urología
- Cirugía General y Ginecología
- Otras
En ellos se utilizan animales para aprender el manejo de los tejidos con el robot, y también cadáveres para la realización de técnicas específicas, antes de llegar a la experiencia clínica.
Los requisitos para la obtención de privilegios para llevar a cabo cirugía robótica fueron publicados en Surgical Laparoscopy, Endoscopy and Percutaneous Techniques 17(1):17-25 por G Ballantyne y W Kelly (Granting clinical privileges for telerobotic surgery) e incluyen los siguientes (para los cirujanos americanos):
- Certificación quirúrgica oportuna
- Acreditación para llevar a cabo por vía abierta y por vía laparoscópica las intervenciones que se van a realizar con asistencia del robot
- Realización satisfactoria del curso de formación obligatorio de la FDA sobre el empleo seguro del sistema robótico
- Observación de un cirujano experimentado realizando cirugía robótica
- Realización de 5-10 procedimientos en modelo animal
- Ayudar a un cirujano cualificado en 5-10 intervenciones de cirugía robótica, o...
- Supervisión por un “preceptor” durante las primeras 5-10 intervenciones robóticas
- Observación por un “proctor” de 5-10 cirugías robóticas
- Monitorización subsiguiente en las intervenciones de cirugía robótica
El ponente afirmó que cualquier institución que quiera introducir la cirugía robótica tiene que prepararse económicamente para compensar a los preceptores que tengan que venir de fuera a formar a los cirujanos de la institución.
Los problemas de la cirugía cardíaca asistida por robot fueron presentados a continuación por el Dr. J Bonatti (Austria), en la ponencia Stepwise technical problem solving in robotic heart surgery. Este ponente comentaba que la mayoría de los cirujanos cardíacos se incorporaron a la robótica sin saber nada de laparoscopia ni toracoscopia, y señalaba como problemas más frecuentes en este ámbito:
- Sangrado de los puertos de entrada
- Sangrado de la arteria mamaria
- Lesiones epicárdicas
- Oclusión proximal de los vasos
- Estrechamiento de las anastomosis
- Sangrado de las anastomosis
Y como factores importantes para solucionar estos problemas:
- Contar con un equipo estable
- Disponer de pegamentos de fibrina
- Disponer de equipo con cuarto brazo
Las conclusiones de este ponente fueron aplaudidas por la sala:
- Be patient
- Be regular
- Be proud of what you can do with your team
(Es necesario tener paciencia y regularidad y estar orgulloso de lo que se puede conseguir trabajando en equipo)
A continuación el Dr. J Magrina (USA), de Arizona, presentó un video titulado Robotic excision of bladder endometrioma, donde se pudo presenciar el cierre de la vejiga en dos planos a mano con el robot.
Cerró la Mesa el Dr.A Choudhry (Alemania), con la ponencia Development of new computer-based methods for the workplace of the future in abdominal surgery.
A última hora de la tarde tuvo lugar la reunión ejecutiva de la MIRA, a la que fueron invitados todos los asistentes al Congreso.
Sábado 10 de diciembre. Mañana
El gran número de comunicaciones recibidas hizo necesario ampliar la programación prevista de dos días a la mañana del sábado, en la que se organizaron dos mesas de presentaciones libres.
En la primera, moderada por I Sawczuk y A Pigazzi, se presentaron las siguientes comunicaciones:
- J Magrina (USA) Robotic hysterectomy and bilateral salpingoophorectomy
- R Munver (USA) Robotic assisted laparoscopic radical prostatectomy: five year surgical practice patterns at Hackensack University Medical Center. The first institution with 3 Da Vinci surgical systems
- J Rueckert (Alemania) Results of robotic assisted thoracoscopic thymectomy
- T Schachner (Austria) Totally endoscopic double coronary artery bypass grafting on the arrested heart using the da Vinci telemanipulation system
- A Kural (Turquía) Robot assisted laparoscopic prostatectomy: initial turkish experience with first 20 cases
- S Lyass (USA) Robotic-assisted laparoscopic Roux-en-Y gastric bypass for morbid obesity
- C Galvani (USA) Robotic assistance for the treatment of epiphrenic diverticulum: initial experience
- F Melfi (Italia) Robotic versus video-assisted thoracic surgery (VATS): what is the advantage of a robotic procedure over a thoracoscopic technique?
- J Magrina (USA) Robotic hysterectomy
- J Choi (Corea) A vision integrated distributed control system for an intelligent laparoscopic surgery robot
- J Petelin (USA) Remote presence patient care in a community hospital. Early experience
Y después de la pausa para el café, en otra mesa, moderada por M Angelini y J Hubert:
- G Tak Sung (Corea) Robotic assisted radical prostatectomy using the Da Vinci surgical robotic system: initial korean experience
- S Fessler (Austria) The role of robotic assisted sacrocolpopexy and hysterosacropexy in prolaps surgery
- N Bonaros (Austria) Development of totally endoscopic ASD II repair
- F Haertl (Alemania) Universal actor platform for minor access surgery
- J Hubert (Francia) Laparoscopic transperitoneal nephrectomy using a remote-controlled robotic surgical system (Da Vinci). 40 cases
- M Reiter (Alemania) ROLAF study: robotic versus laparoscopic fundoplication
- S Belsley (USA) Robotic thymectomy for a mediastinal parathyroid gland
- M Ismail (Alemania) Thoracoscopic resection of mediastinal parathyroid glands with the Da Vinci robotic system: the optimal surgical therapy
- J Magrina (USA) Robotic resection of lateral pelvic wall tumor recurrence
- W Draaisma (Holanda) Mid-term results of robot-assisted laparoscopi repair of large hiatal hernias: a symptomatic and radiologic follow-up study
A pesar del apretado programa y de nuestro gran interés por tomar cumplida nota de todo el desarrollo científico del Congreso, algo de tiempo hubo para visitar la preciosa y fría ciudad de Innsbruck, como se muestra en algunas imágenes.