HEMICOLECTOMÍA DERECHA LAPAROSCÓPICA CON ASISTENCIA ROBÓTICA
Autores: Ortiz Oshiro, E., Ramos Carrasco, A., Sánchez Egido, I., Anula Fernández, R., Álvarez Fernández-Represa, J.
Centro:
Hospital Clinico San Carlos. Madrid
INTRODUCCIÓN
Se presenta la técnica de la hemicolectomía derecha laparoscópica asistida con robot Da Vinci.
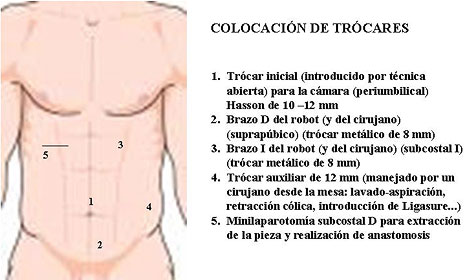
Con el paciente en decúbito supino y bajo anestesia general, se colocan los trócares como se muestra en la figura. El primer trócar (periumbilical para la óptica) se introduce mediante técnica abierta y el resto, una vez introducido el neumoperitoneo hasta 12 mmHg, de la forma habitual.
DESCRIPCIÓN DE LA TÉCNICA
1. Tiempo robótico
Con los trócares en posición, se coloca la mesa en decúbito lateral hacia la izquierda del paciente y ligero antiTredelenburg y se aproxima el carro quirúrgico (los brazos del robot) desde el flanco D del paciente de forma que el robot se sitúa justo detrás del campo quirúrgico. Para esta intervención utilizamos tres brazos del robot: el central para la óptica y los brazos D e I para el trabajo del cirujano desde la consola. El cuarto brazo no lo usamos en este procedimiento. El trócar de 12 mm que está en la fosa iliaca izquierda del paciente es manejado por los cirujanos que están en la mesa (auxiliar).
Se inicia el procedimiento con la identificación, disección y sección de los vasos del paquete ileocólico lo más proximal posible. Para ello se tracciona de la unión ileocólica con un instrumento tipo Endobabcock romo desde el trócar auxiliar. El cirujano trabaja con una pinza de tracción (Cadiére) y en este caso con Ultracision desde el trócar robótico derecho. Una vez disecada, se clipa y se secciona la arteria ileocólica.
El paso anterior permite traccionar el pedículo ileocólico y mostrar la ventana que se continúa hacia la cara posterior del ciego. Para seccionar el íleon terminal se abre primero el mesenterio manteniéndolo traccionado y luego se secciona con EndoGIA con carga blanca y funda SeamGuard (para evitar el sangrado del borde de sección). El mesenterio se secciona entonces con Ultracision desde la raíz ileocólica seccionada hasta el punto de sección del ileon terminal.
La retracción del ciego con el muñón del ileon terminal presenta la cara posterior del mismo permitiendo su disección. Cuando se llega a la reflexión parietocólica D se procede a su sección con el mismo instrumento Ultracision.
Se avanza en la disección de la cara posterior del colon ascendente con la pieza retraída al cenit. El último paso de la fase robótica es la liberación del ángulo hepático del colon.
2. Tiempo abierto
A través de una minilaparotomía transversa en el hipocondrio D protegida con un retractor Alexis, se extrae la pieza y se secciona el colon transverso con EndoGIA. A continuación se realiza una anastomosis ileocólica laterolateral manual de la forma tradicional. Se reintroduce en la cavidad y se cierra el dispositivo Alexis para volver a hacer neumoperitoneo.
3. Tiempo laparoscópico
Se sutura con continua la brecha mesentérica y se revisa la hemostasia. Drenaje parietocólico opcional y retirada del neumoperitoneo y de los trócares, visualizando el puerto de cada uno de ellos para comprobar la ausencia de hemorragia parietal. Cierre de la minilaparotomia y de los orificios de los trócares.