INTRODUCCIÓN
El día 3 de agosto de 2006 hicimos la primera cirugía antirreflujo laparoscópica con asistencia robótica que se ha hecho en nuestro país, en el Hospital Clínico San Carlos de Madrid. Casi año y medio después, con una experiencia de 22 procedimientos, podemos afirmar que el robot Da Vinci aporta a esta técnica ventajas importantes relacionadas con la visión tridimensional y con la comodidad del cirujano, que mejoran en consecuencia, de forma fundamental, la seguridad de la intervención.
POSICIÓN DEL PACIENTE Y TRÓCARES. COLOCACIÓN DEL ROBOT
La preparación del paciente es idéntica a la que realizamos para la cirugía antirreflujo laparoscópica: anestesia general, posición de litotomía, con las piernas ligeramente abiertas y estiradas y colocación de sonda transgástrica de Maloney 48-60F (solo durante la realización del Nissen).
TÉCNICA
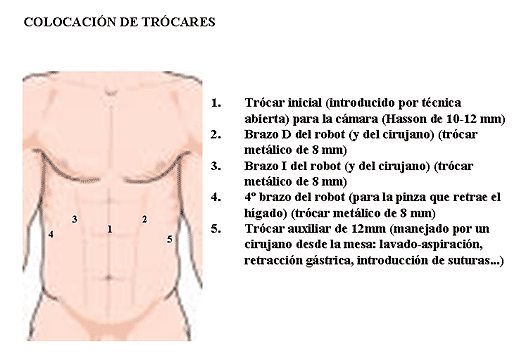
Fig. 1. Abordaje laparoscópico abierto colocando el trócar para la óptica en la línea media supraumbilical, aproximadamente en la unión de los dos tercios superiores con el tercio inferior de la línea umbilico-xifoidea. Los tres trócares metálicos del robot (8 mm) se colocan simétricos en ambos hipocondrios y en el reborde costal derecho hacia el flanco (4º brazo). El puerto auxiliar (10-12 mm) se coloca en el flanco izquierdo.
Fig. 2. Una vez colocados los trócares, se aproxima a la mesa el robot cuyos brazos han sido previamente enfundados en fundas estériles. El brazo central (de la óptica) y los brazos derecho, izquierdo y cuarto, son engarzados a los trócares. El trócar auxiliar será manejado por el cirujano ayudante que está en la mesa. Se introducen los instrumentos y el cirujano se sienta en la consola.
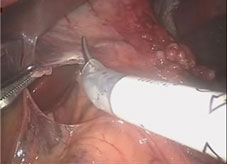
Fig. 3. Sección de los últimos vasos cortos. El lóbulo izquierdo hepático es retraído por una pinza plana atraumática con el cuarto brazo del robot. Los brazos derecho e izquierdo presentan el tejido a seccionar con pinzas atraumáticas (pinzas de Cadiére) y desde el trócar auxiliar se introduce un terminal de Ligasure de 5 mm con el que se seccionan los últimos vasos cortos de la curvadura mayor gástrica.
Fig. 4. Es preciso ser muy cuidadosos en la disección de la parte más alta de la curvadura mayor y el ángulo de His, para evitar la lesión del bazo o el posible desgarro de algún vaso muy corto en las maniobras de tracción.
Fig. 5. Realizamos la disección de la unión esofagogástrica con tijera conectada a coagulación monopolar, empezando por la pars fláccida de la curvadura menor. La amplia posibilidad de giro de los instrumentos que proporciona el robot facilita en gran medida esta disección.
Fig. 6. La disección progresa de derecha a izquierda del paciente, mostrando primero el pilar diafragmático derecho, luego la cara anterior del esófago y luego el pilar izquierdo.
Fig. 7. La retracción y la disección de la cara posterior esofágica es facilitada de forma muy significativa por el Da Vinci: la visión tridimensional y la posibilidad de giro de los instrumentos son los elementos que contribuyen a este hecho.
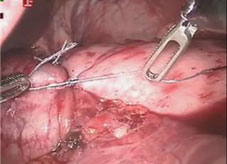
Fig. 8. Una vez completada la disección, se cambia el instrumento del brazo derecho del cirujano por un portaagujas. Se aproximan los pilares con puntos sueltos de material irreabsorbible trenzado de 2-0. El número de puntos depende del tamaño de la hernia. En algunas hernias diafragmáticas de gran tamaño puede ser necesario cubrir el defecto con una malla siliconada.
Fig. 9. La intervención se completa con la realización del Nissen con tres puntos del mismo material, aproximando la lengüeta gástrica pasada por detrás del esófago, la cara anterior de este y la curvadura mayor gástrica. Este tiempo se realiza previa colocación por parte del anestesista de una sonda de Maloney transoral nº 48-60, con el fin de evitar la disfagia postoperatoria. Finalmente, la válvula se fija al pilar diafragmático derecho para evitar su deslizamiento hacia el tórax.
Terminado el procedimiento, se retiran los instrumentos robóticos y se apartan los brazos del Da Vinci de la mesa. La retirada de trócares se realiza bajo visión directa, con la cámara del robot manejada desde la mesa manualmente. Se cierra la aponeurosis de los puertos de 10-12 mm y la piel con grapas. Se infiltran las heridas con bupivacaína.